

ROBO DAVE - AUTONOMOUS GAMEPLAYING ROBOT
c. 2017
Mechatronics
Paa Adu, Laura Blumenschein, Zach Chase, Jamie Young
Robo Dave was an autonomous, game-playing robot designed and built for Stanford’s ME 218B. Optimized for a specific game board and game protocol, Robo Dave incorporated various electro-mechanical functionalities, including:
Ability to follow a current carrying wire by using peak LC resonance circuits
Ability to communicate with the LOC (a provided micro-controller) that spits out real time gameplay information through an SPI
Ability to read the presence and frequency of a magnetic field
Ability to sense a given IR frequency, and aim a shooter towards the IR emitter
Ability to shoot a foam ball 6 ft. into a 1 ft. diameter bucket
Ability to emit IR at a given frequency to a fixed detector
Ability to receive new foam balls from a reloader
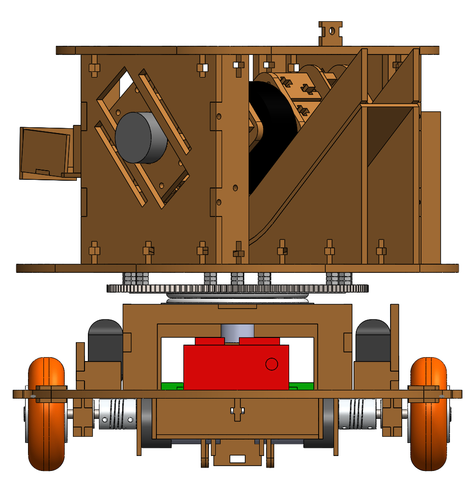
Robo Dave’s mechanical design was based around two distinct subassemblies - a base level which held our drivetrain, the majority of our circuitry and a stepper motor to drive the turret, and a rotating turret which housed our shooting, reloading and IR sensing subsystems.










Note that Robo Dave was controlled by a TIVA Launchpad programmed in C, and was powered by two 7.2V batteries. Furthermore, all circuit boards used were custom designed and soldered.
For an in depth description of Robo Dave, please see the project website linked blow.