
Le Roo — A Kangaroo Crawler
c. 2016
Mechanical Design
Alex Le Roux, Aaron Oro, Jeff Sarsona, Jamie Young
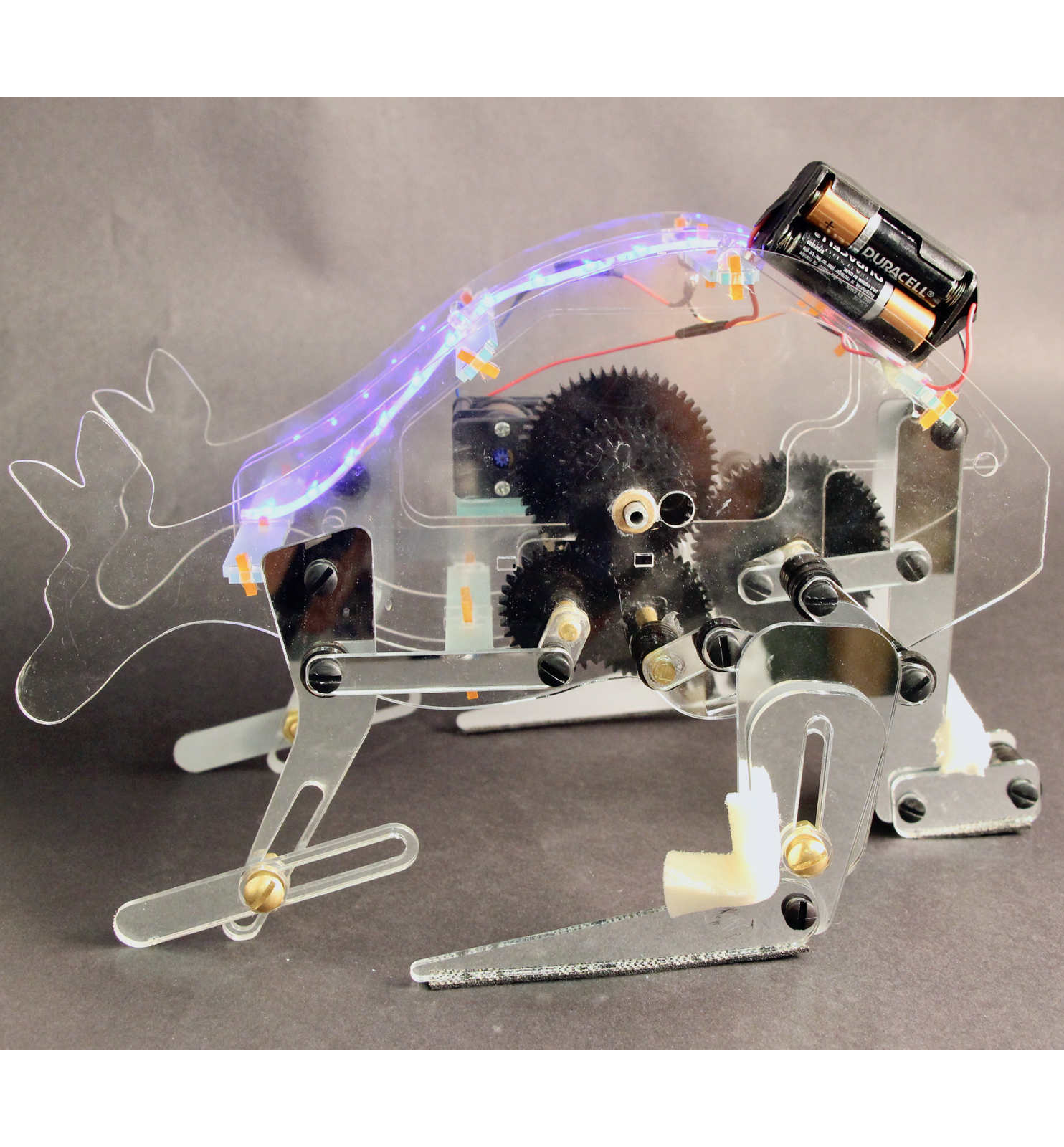
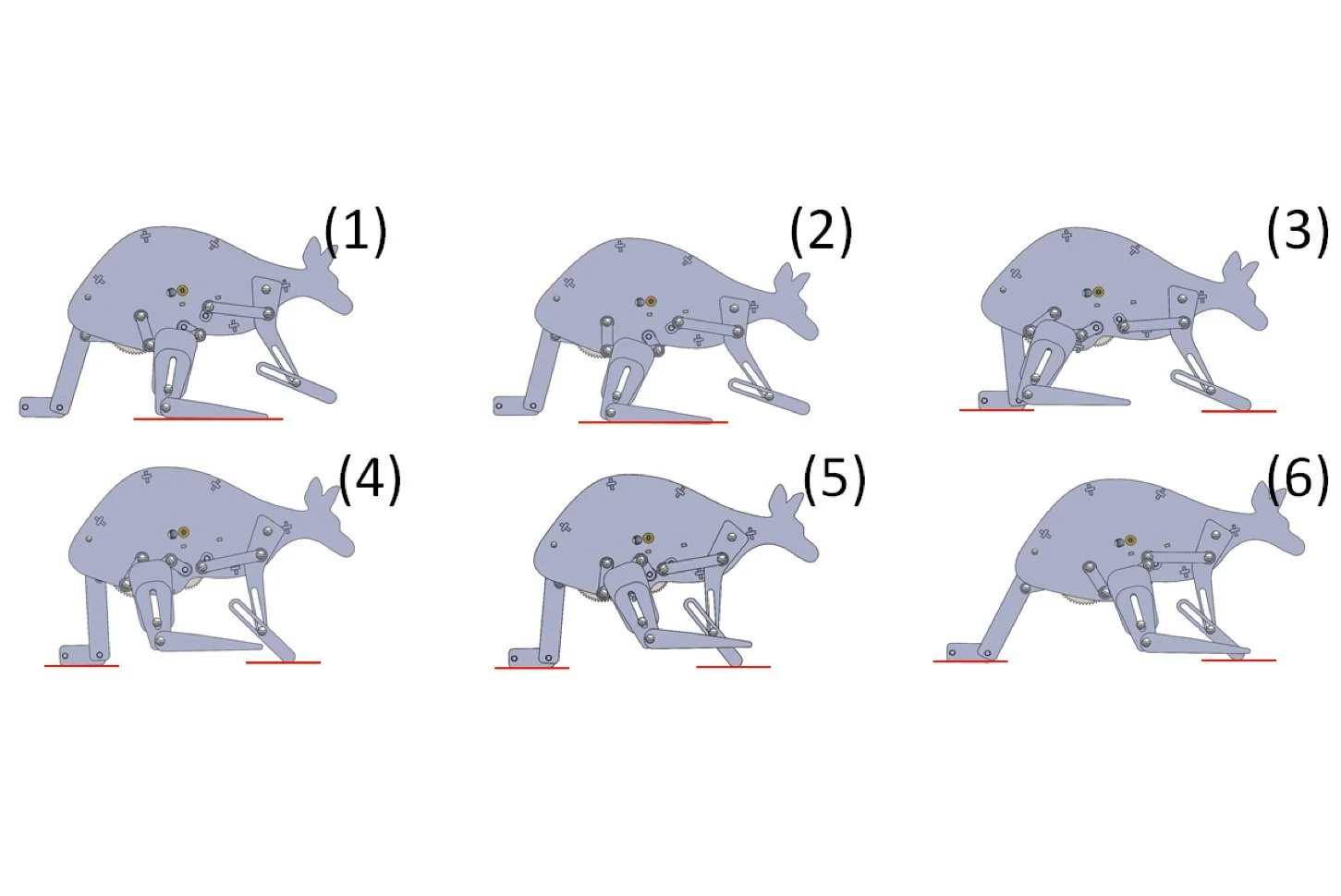
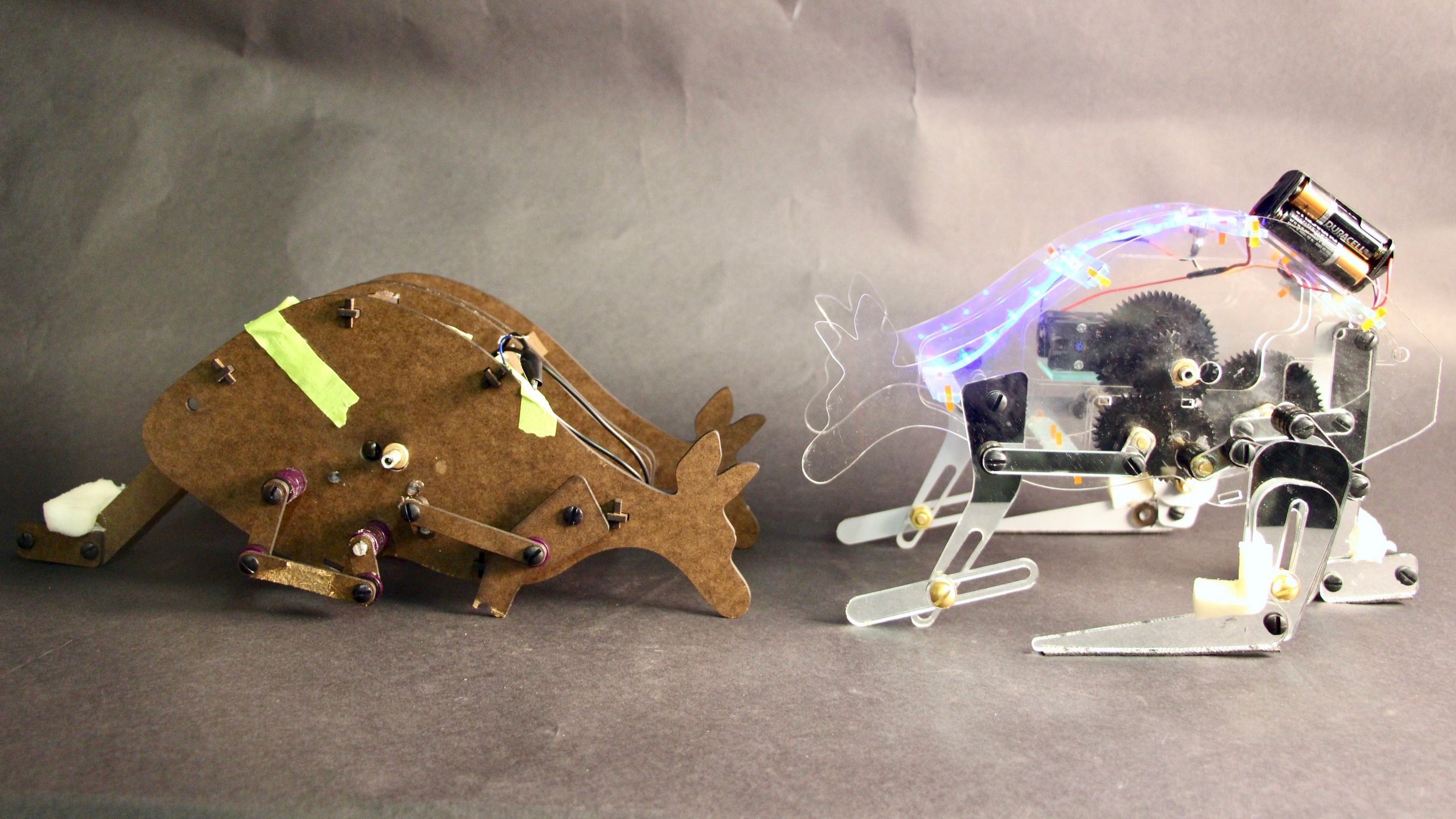
For Stanford’s ME 112, we were tasked with creating a battery powered kangaroo crawler. Specifically, the crawler had to mimic a peculiar gait kangaroos employ when grazing that involves the kangaroo using its tail as a propulsive fifth leg. To demonstrate this, the crawler had to walk over a 15m section of cobbled pavement.
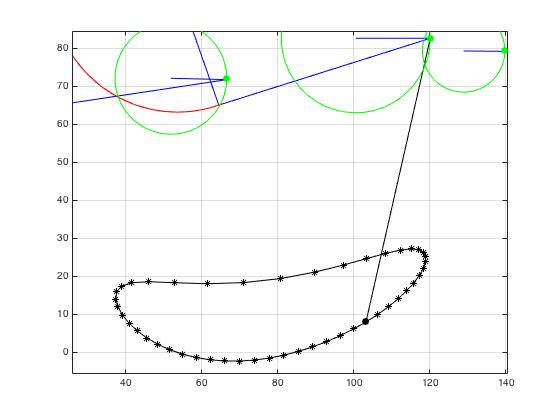
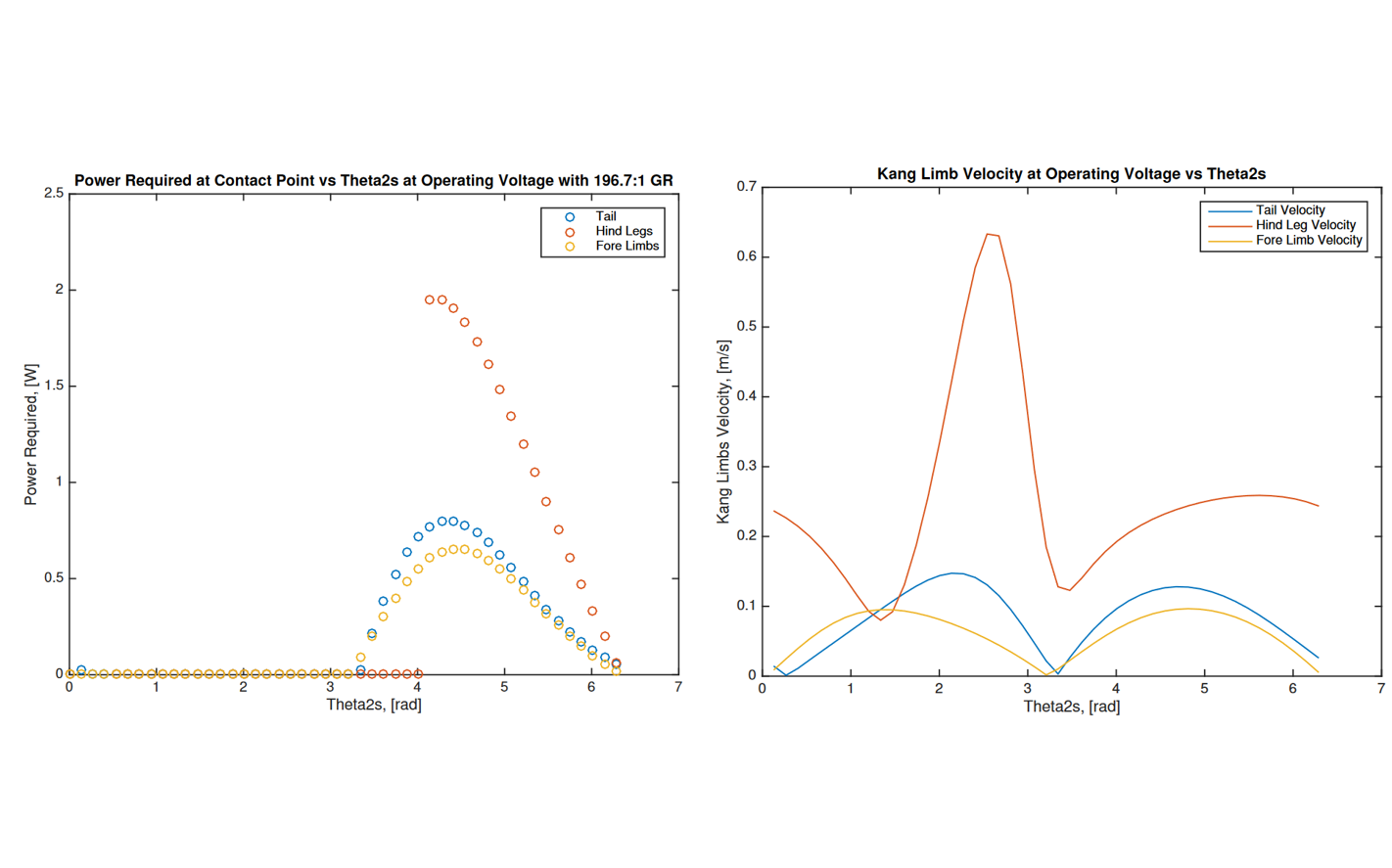
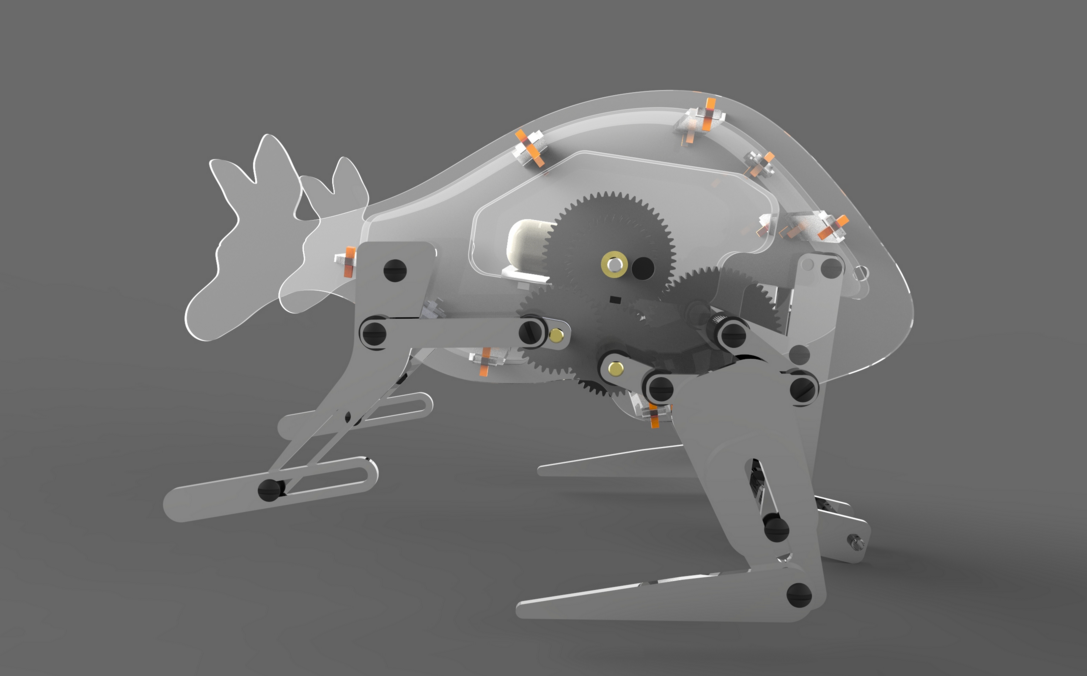
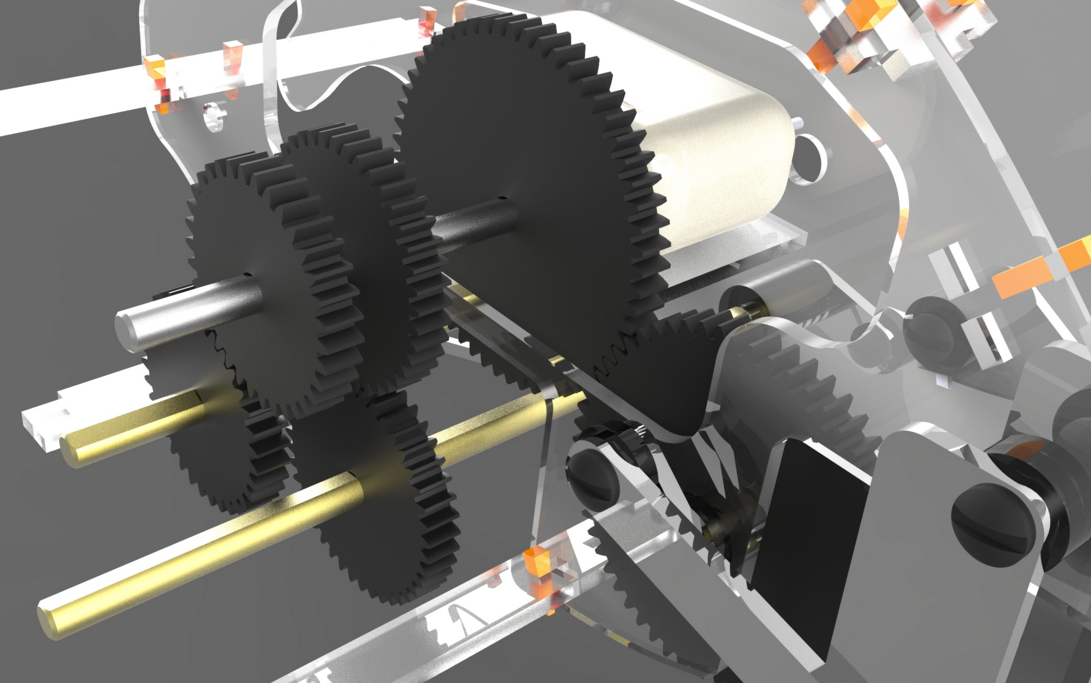
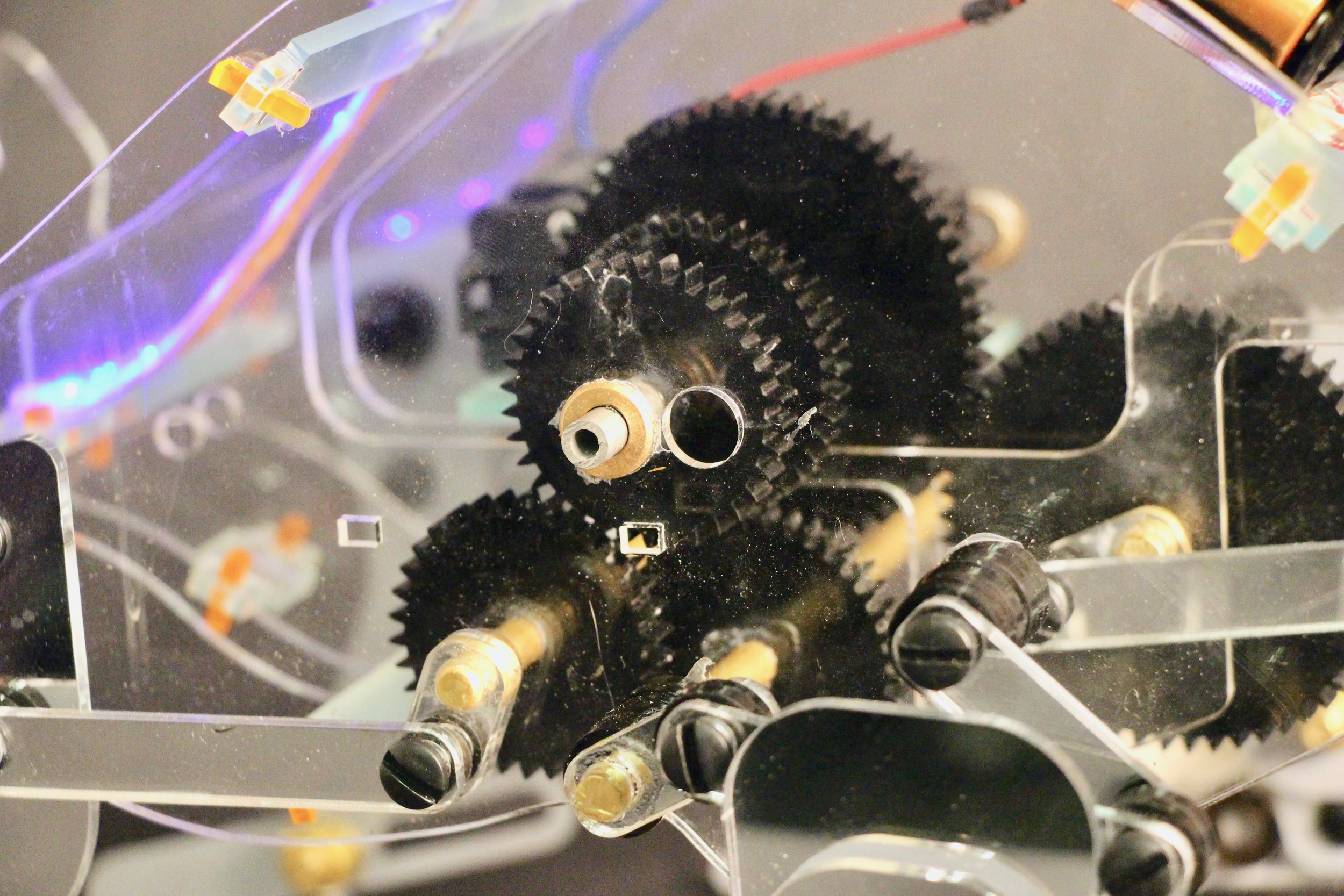
To achieve this goal, we transmitted power from a 197:1 gearbox through a custom laser-cut geared drivetrain to a linkage system designed to simulate the proper gait. This system was comprised of three unique linkages: a 4-bar front leg rocker, a 4-bar tail rocker, and a 4-bar back leg linkage with a semi-circular motion. Three AAA batteries amounting to an input of 4.5V powered a small motor in the gearbox.
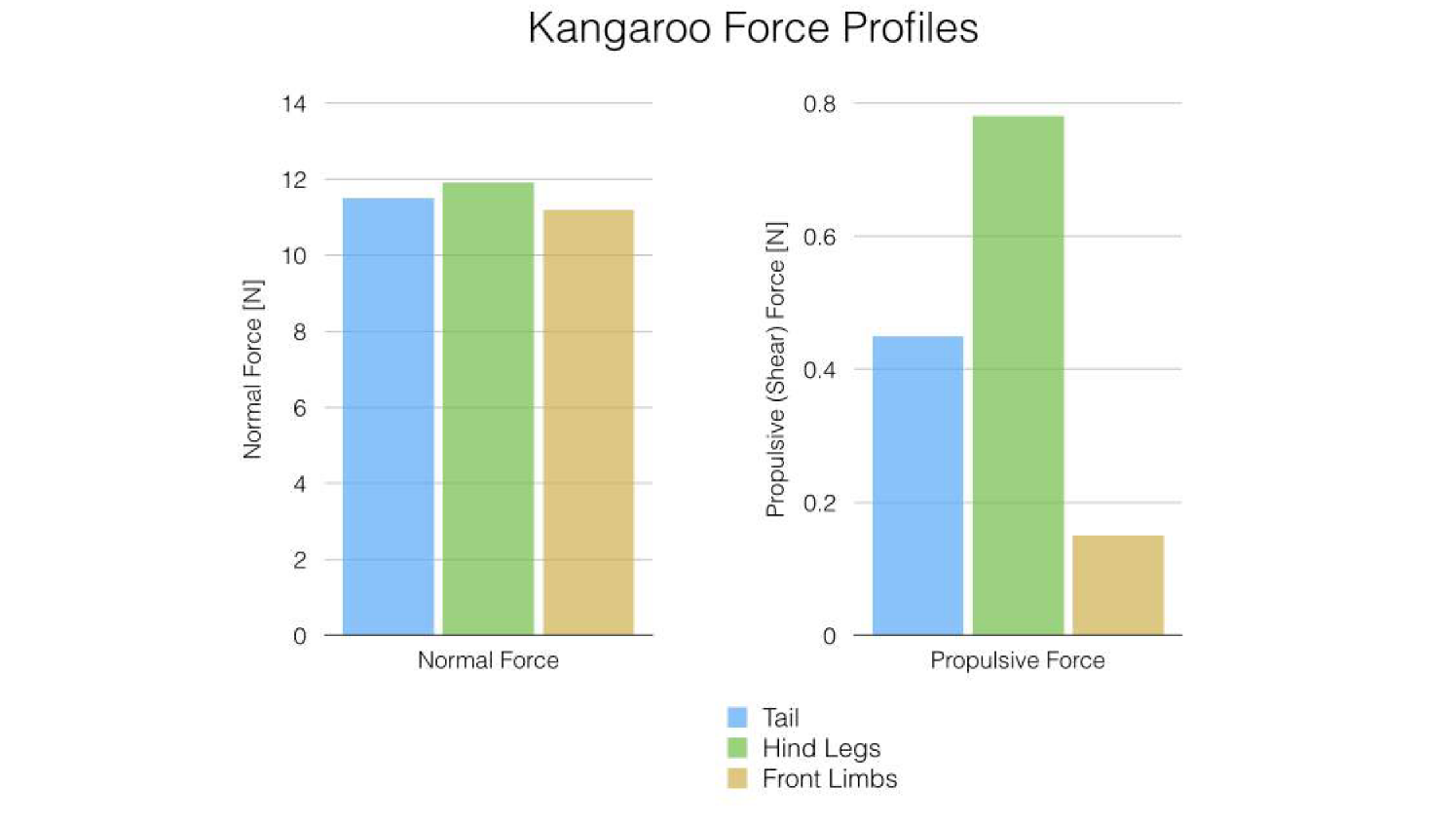
Ultimately, Le Roo was able to easily cross the cobbled pavement and accurately mimicked the kangaroo’s gait. Validation testing revealed that Le Roo moved at 14.38 cm/s with an average voltage and current draw of 3.78 V and .732 A respectively. Furthermore, our motor ran at near 70% efficiency, and force measurements showed our tail to provide .45N of propulsive force.
The full Le Roo Report can be seen using the link below. Note that this report was awarded The Hoefer Prize for Outstanding Undergraduate Writing.