

Remote Controlled Hovercraft
c. 2017
Mechatronics
Jason Flahie, Matthew Matera, John Whitworth, Jamie Young
For Stanford’s ME 218C, we were tasked with building a hovercraft controlled by a remote via the use of Xbee radio communication. Specifically, this hovercraft needed to be able to herd smaller hovercrafts, programmed to move randomly, into a safe zone.
For the remote, we decided to use a Bop-It! toy and retrofitted its mechanical actuators to perform necessary functions. We also added an accelerometer so that the user could control direction and maneuverability by moving the Bop It! like a steering wheel.
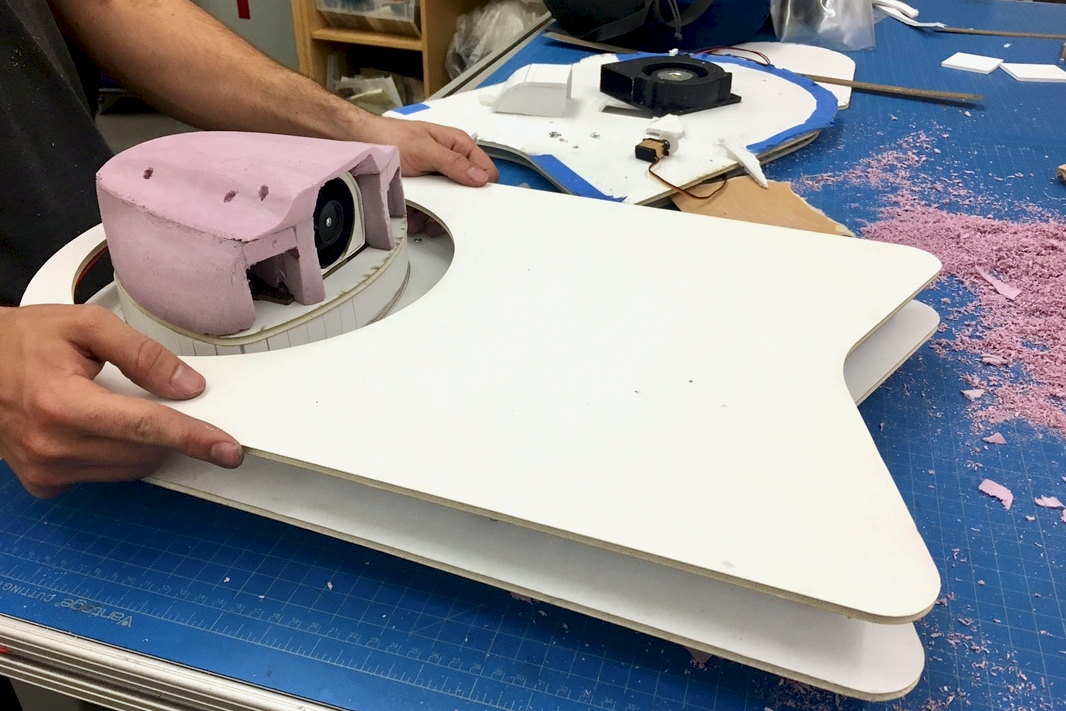
For the hovercraft, we used a lift fan to inflate a plastic skirt underneath the body of the craft so that it could “hover.” Additionally, we mounted a ducted fan with a motor onto a stepper motor, allowing us to control movement and directionality through thrust vectoring.

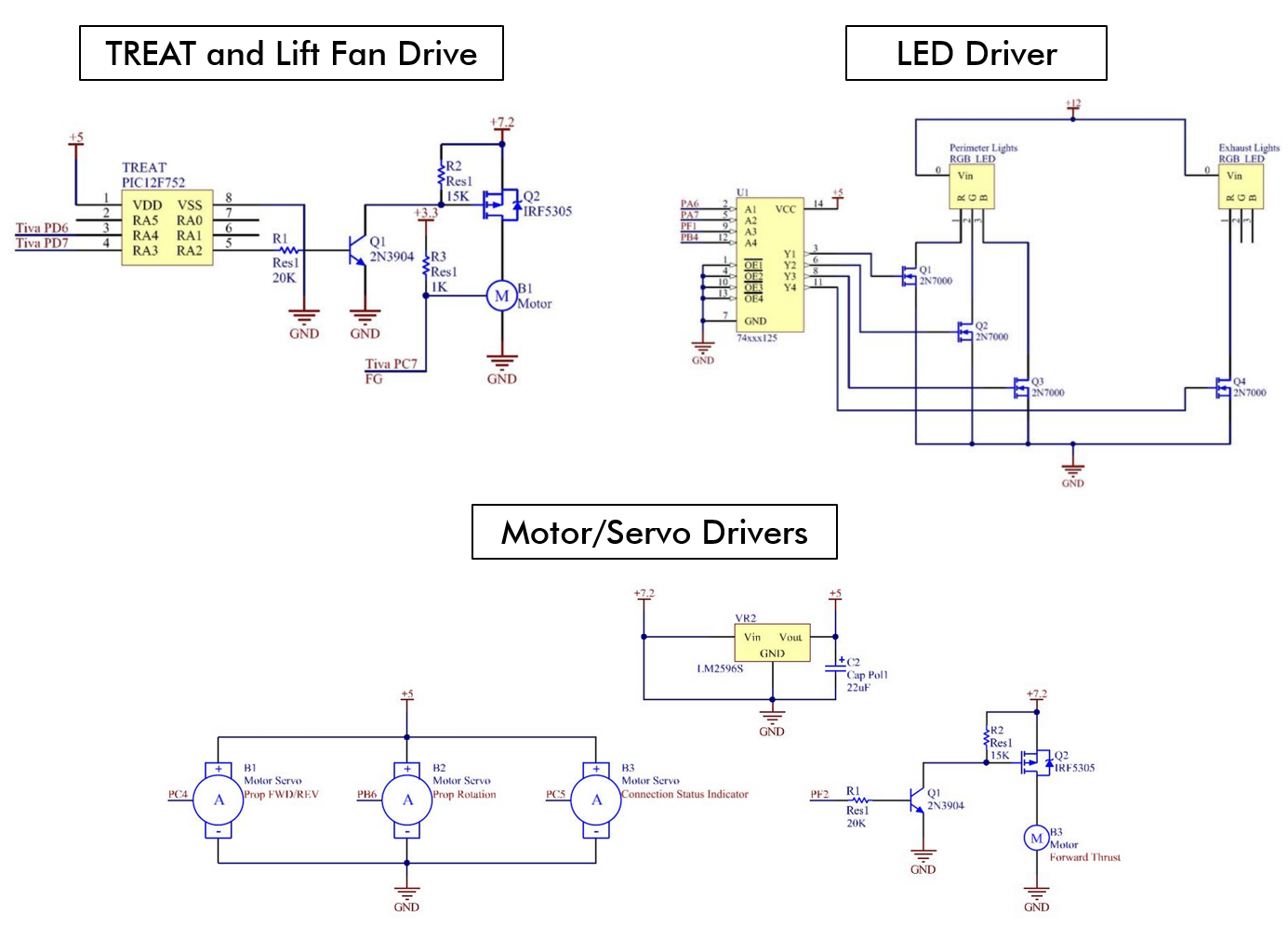
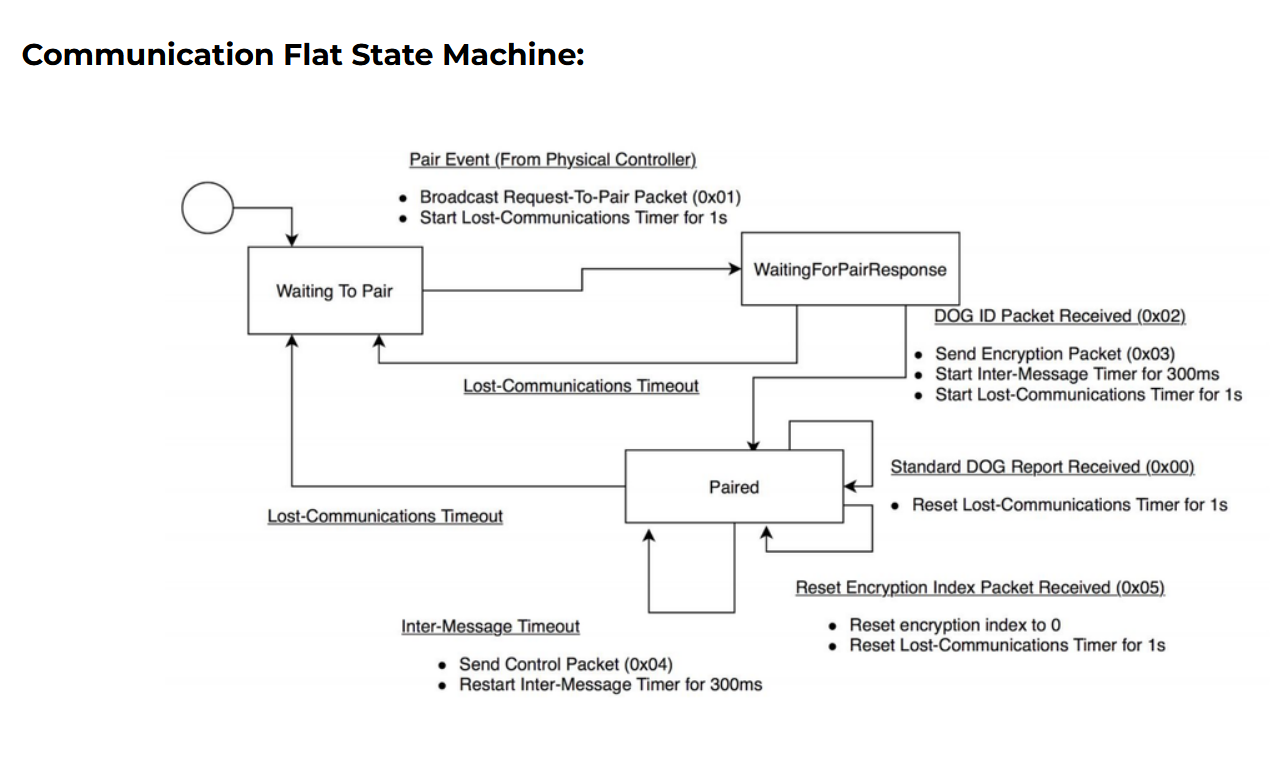
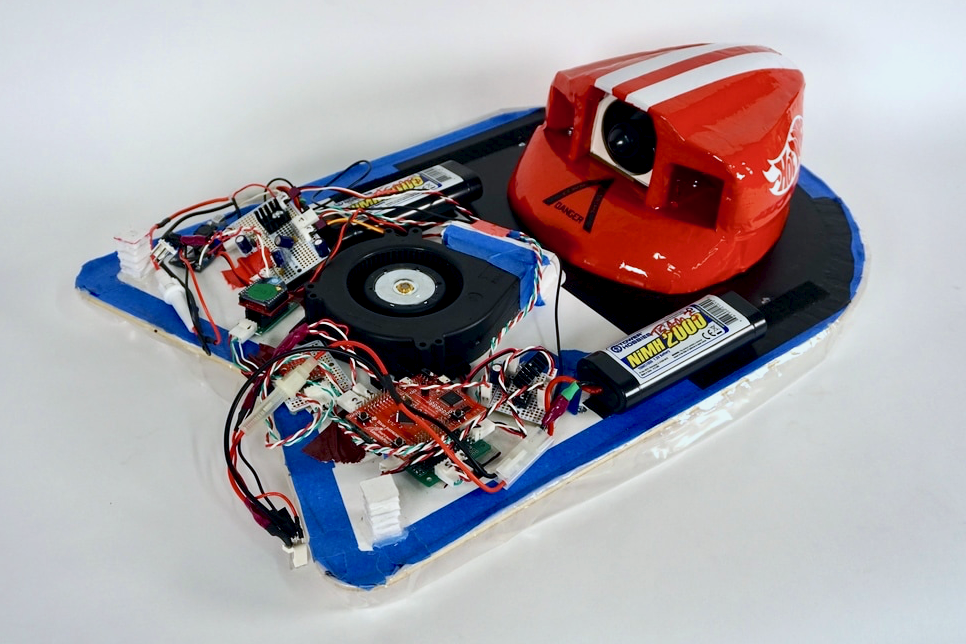





TIVA Launchpads programmed in C were used to control both the remote and hovercraft. They communicated with the Xbee radios through a UART communication protocol, and with the accelerometer through an SPI. Also, the hovercraft lift fan was controlled by a PIC12F752 programmed in Assembly. Finally, all circuit boards used were custom designed and soldered.
For more information, please see the full project website linked below.